De acordo com as Leis 12.965/2014 e 13.709/2018, que regulam o uso da Internet e o tratamento de dados pessoais no Brasil, ao me inscrever na newsletter do portal DICAS-L, autorizo o envio de notificações por e-mail ou outros meios e declaro estar ciente e concordar com seus Termos de Uso e Política de Privacidade.
Conceito - Evitando acidentes com visão computacional
Colaboração: Alessandro de Oliveira Faria
Data de Publicação: 06 de agosto de 2014
Visão computacional é uma divisão da computação que trabalha com o conceitos das máquinas que enxergam. Esta tecnologia é geralmente aplicada em robôs industriais, veículos autônomos, câmeras inteligentes, biometria e outros sistemas computacionais.
 |
Trabalhos relacionados à visão computacional, têm ainda um longo caminho evolutivo, pois somente após o final da década de 70 que se iniciaram estudos aprofundados. Entretanto, a evolução do hardware e os seus respectivos recursos, vem ajudando muito ao progresso deste segmento.
A visão computacional é um problema mal posto, como também não existe uma formulação padrão para a resolução do mesmo, todos os métodos são baseados em aprendizagem e está cada vez mais comum no mercado de tecnologia.
O reconhecimento de padrões e a aprendizagem de máquina é um processo que consiste em determinar se uma imagem contém ou não um objeto. As principais lógicas de processamento estão classificadas geralmente em:
- Aquisição da imagem: geralmente a imagem é obtida através de um dispositivo de vídeo captura, câmeras digitais, celulares, smartphones e outros.
- Pré-processamento: geralmente, é necessário processar a imagem para garantir as condições mínimas. Por exemplo, redução de ruídos, balanceamento de brilho e contraste.
- Extração da características: características matemáticas em diversos níveis de dificuldades são extraídas. Como exemplo, o processo de detecção de borda, cantos, morfologia matemática e muitos outros.
- Segmentação: a seleção de regiões de interesse e/ou segmentação são incluídas nas áreas que contém o objeto.
- Processamento: um conjunto de dados é processado e verificado a satisfação e conformidades matemáticas.
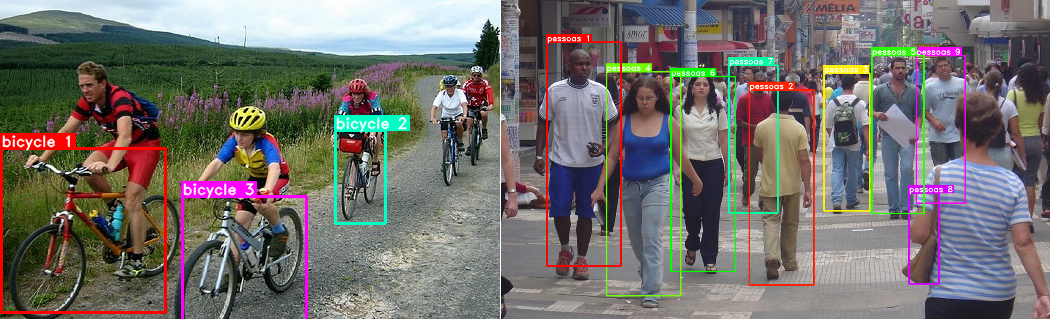
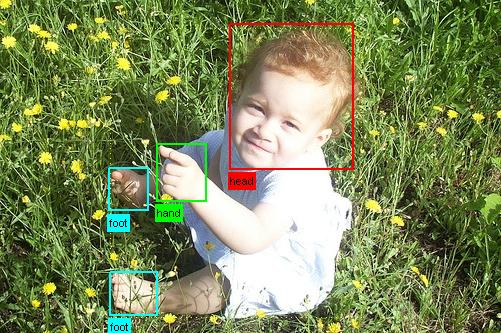
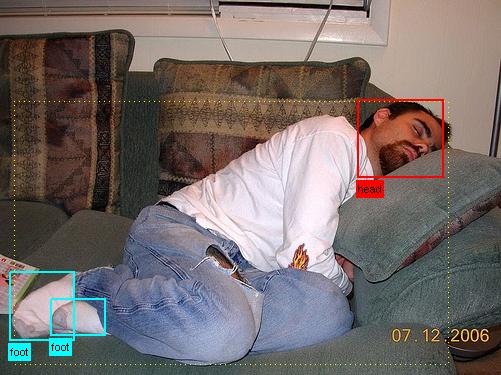
O princípio computacional do título deste artigo, baseia-se com os devidos treinos computacionais (o qual não é o objetivo deste documento), podemos detectar animais, humanos, partes do corpo e objetos. Então, se identificados os itens mencionados, podemos estimar a ação do indivíduo e/ou animal e objeto.
 |
 |
 |
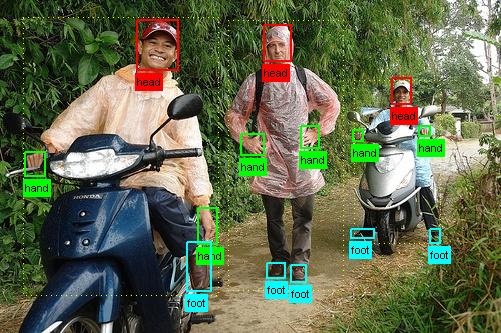 |
Após detectar as partes do corpo, calculamos os vetores para simplificar o trabalho do algoritmo de detecção de esqueleto. Sendo assim, facilmente identificamos, por exemplo, pedestres, ciclistas, cavalos e outros prováveis obstáculos possivelmente diante do veículo.
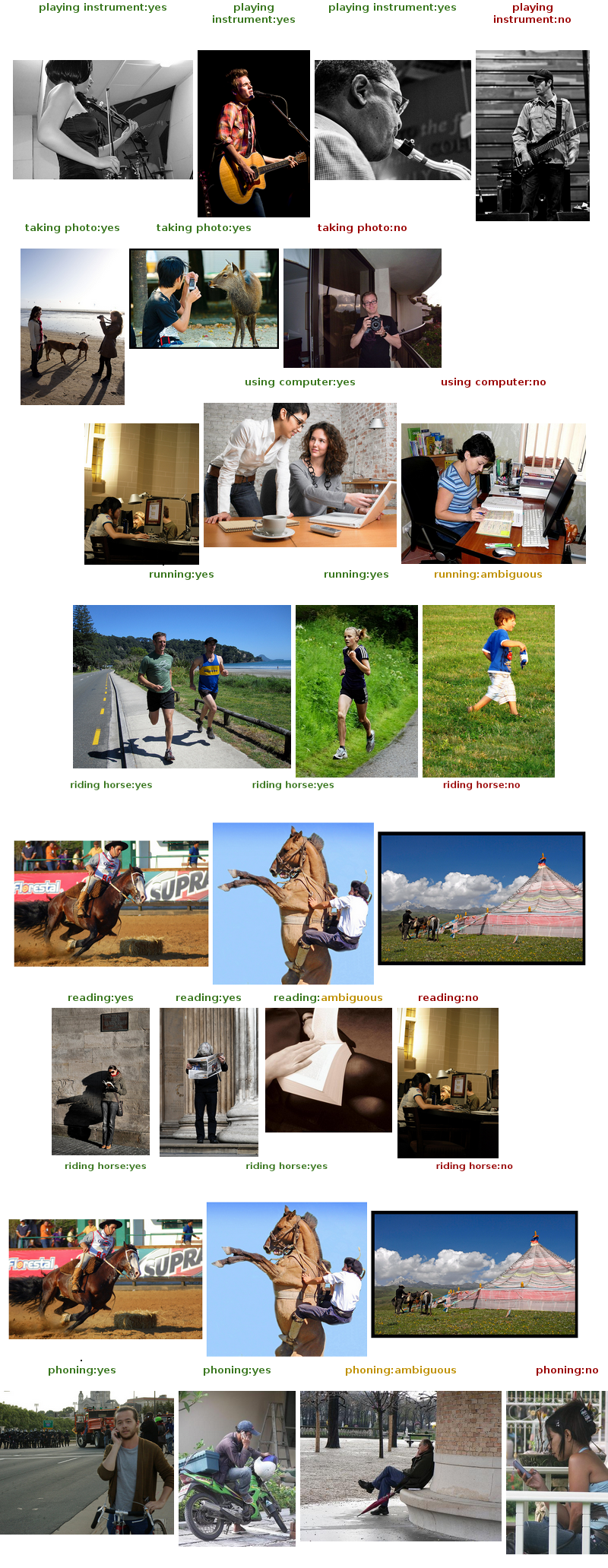 |
Com todas estas informações, as ações como pular, falar ao celular, tocar um instrumento, ler, cavalgar, correr, tirar foto, usar um computador e outros, tornaram-se uma tarefa tangível.
E a performance? Em 2011 utilizei a biblioteca OpenCV compilada com as chamadas do SDK NVIDIA. Ou seja, utilizei a GPU para obter o máximo desempenho na localização de padrões. No caso do vídeo demonstrativo a seguir uma face.
Atualmente, com a abertura do código Tegra para GNU/Linux, podemos em hardwares embarcados, utilizar todo o poder do hardware junto à biblioteca OpenCV e outros recursos/bibliotecas de visão computacional.
Mão na massa
O motor principal do projeto é a biblioteca LibPaBOD, escrita em C++ e criada para detectar objetos usando misturas de modelos, assim, detectando parcialmente peças do objeto em questão.
O processo recebe uma imagem que, por sua vez, é submetida ao processamento, utiliza modelos anteriormente treinados em MATLAB. Esta biblioteca utiliza, como dependência, os pacotes OpenCV e MatIO, então instale na sua distribuição favorita os requisitos para iniciar a instalação desta biblioteca.
O download do código fonte deve ser efetuado com o comando git, conforme o exemplo abaixo:
# git clone ""https://github.com/mjmarin/libpabod Cloning into 'libpabod'... remote: Counting objects: 350, done. remote: Total 350 (delta 0), reused 0 (delta 0) Receiving objects: 100% (350/350), 684.93 KiB | 176.00 KiB/s, done. Resolving deltas: 100% (179/179), done. Checking connectivity... done
Logo a seguir, entre na pasta recém criada, crie a pasta build e utilize o comando cmake:
# cd libpabod/
# mkdir build
# cd build/
# cmake ..
-- The C compiler identification is GNU 4.8.1
-- The CXX compiler identification is GNU 4.8.1
-- Check for working C compiler: /usr/bin/cc
-- Check for working C compiler: /usr/bin/cc -- works
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Check for working CXX compiler: /usr/bin/c++
-- Check for working CXX compiler: /usr/bin/c++ -- works
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- CMAKE_BUILD_TYPE=
-- Found PkgConfig: /usr/bin/pkg-config (found version "0.28")
-- checking for module 'matio>=1.3.3'
-- found matio, version 1.5.2
-- MATIO lib=matio;hdf5;z
-- -------------------------------------------------------------------------------
-- GNU COMPILER
-- -------------------------------------------------------------------------------
-- OpenCV_LIB_DIR=
--
-- -------------------------------------------------------------------------------
-- General configuration for pabod 0.2.10
-- -------------------------------------------------------------------------------
--
Built as dynamic libs?:ON
Compiler:/usr/bin/c++
-- C++ flags (Release): -Wall -Wno-long-long -ffunction-sections -fopenmp -fomit-frame-pointer -O3 -ffast-math -mmmx -msse -msse2 -msse3 -DNDEBUG
-- C++ flags (Debug): -Wall -Wno-long-long -ffunction-sections -fopenmp -g3 -O0 -DDEBUG -D_DEBUG -W -Wextra -Wno-return-type
-- CMAKE_CXX_FLAGS: -Wall -Wno-long-long -ffunction-sections -fopenmp
-- CMAKE_BINARY_DIR: /tmp/libpabod/build
--
-- CMAKE_SYSTEM_PROCESSOR = x86_64
-- BUILD_SHARED_LIBS = ON
-- CMAKE_INSTALL_PREFIX = /usr/local
-- CMAKE_BUILD_TYPE =
-- CMAKE_MODULE_PATH = /usr/local/lib/cmake/;/usr/lib/cmake
--
-- --------------------------- Documentation -----------------------------
--
-- INSTALL_DOC = OFF
-- USE_LATEX =
-- USE_DOT =
-- USE_CHM =
--
-- OpenCV_LIB_DIR=
-- CMAKE_INSTALL_PREFIX=/tmp/libpabod/build
--
--
-- Change a value with: cmake -D<Variable>=<Value>
--
-- Configuring done
-- Generating done
-- Build files have been written to: /tmp/libpabod/build
Agora, utilize o comando make e make install, para efetuar a compilação e instalação do pacote. Se tudo estiver funcionando corretamente, na pasta /usr/local/bin/ estará presente os arquivos detectobj, detectobj2 e detectvid.
Para entender melhor o funcionamento, ao executarmos o comando detectobj precedido dos parÂmentos cavalo.mat como modelo e uma imagem, teremos a seguinte saída como detecção:
# detectobj -m ../../data/models/cavalo_v6.mat -i livinha.jpg -t 0.1
Model: ../../data/models/cavalo_v6.mat
Image: livinha.jpg
Threshold used: 0.1
init done
opengl support available
Searching for objects... This operation may take a few seconds
Elapsed time: 25.3003 seconds
1 object(s) found using threshold = -9.22337e+18
----------------------------------------------
- cavalo 1, score = 0.137023
Push 't' key to save a copy of (t)agged image
Push 'c' key to save each of objects found on differents (c)ut images
Push 'q' key to (q)uit
Após alguns segundos, o resultado será o processamento similar à imagem a seguir:
 |
Este documento tem como objetivo, demonstrar uma prova de conceito sobre como podemos utilizar o poder dos hardwares atuais, junto à força do software livre.
Então, deixo aqui a minha colaboração para futuras ideias e implementações neste segmento.
Críticas e sugestões, enviem para cabelo[at]opensuse.org.
Linux: Utilize qualquer Tablet/Smartphone como monitor estendido sem fio no GNU/Linux
 |
Este artigo foi publicado originalmente no portal Viva o Linux
Adicionar comentário
This policy contains information about your privacy. By posting, you are declaring that you understand this policy:
- Your name, rating, website address, town, country, state and comment will be publicly displayed if entered.
- Aside from the data entered into these form fields, other stored data about your comment will include:
- Your IP address (not displayed)
- The time/date of your submission (displayed)
- Your email address will not be shared. It is collected for only two reasons:
- Administrative purposes, should a need to contact you arise.
- To inform you of new comments, should you subscribe to receive notifications.
- A cookie may be set on your computer. This is used to remember your inputs. It will expire by itself.
This policy is subject to change at any time and without notice.
These terms and conditions contain rules about posting comments. By submitting a comment, you are declaring that you agree with these rules:
- Although the administrator will attempt to moderate comments, it is impossible for every comment to have been moderated at any given time.
- You acknowledge that all comments express the views and opinions of the original author and not those of the administrator.
- You agree not to post any material which is knowingly false, obscene, hateful, threatening, harassing or invasive of a person's privacy.
- The administrator has the right to edit, move or remove any comment for any reason and without notice.
Failure to comply with these rules may result in being banned from submitting further comments.
These terms and conditions are subject to change at any time and without notice.
Comentários