De acordo com as Leis 12.965/2014 e 13.709/2018, que regulam o uso da Internet e o tratamento de dados pessoais no Brasil, ao me inscrever na newsletter do portal DICAS-L, autorizo o envio de notificações por e-mail ou outros meios e declaro estar ciente e concordar com seus Termos de Uso e Política de Privacidade.
Visão Computacional - Reconhecendo objetos na plataforma Linux via Webcam
Colaboração: Alessandro de Oliveira Faria
Data de Publicação: 22 de janeiro de 2013
Visão Computacional - Breve introdução
As bibliotecas de visão computacional (mais especificamente, a biblioteca OpenCV), apresentam:
- Recursos de manipulação de imagem
- Entrada e saída de vídeo
- Cálculo de matriz
- Álgebra linear
- Morfologia matemática
- Análise estrutural
- Reconhecimento de objeto
- Gráficos primitivos
Como se não fosse o suficiente, a biblioteca OpenCV abstrai a utilização de técnicas de programação multinuclear como OpenMP e TBB da Intel, como também a utilização de GPU.
Para detectar objetos, é preciso utilizar algoritmos que obtêm características invariantes no aspecto de rotação e escala com relação ao ponto de observação do dispositivo de captura. Para que, somente então, posteriormente utilizarmos esta abstração para comparação entre duas imagens.
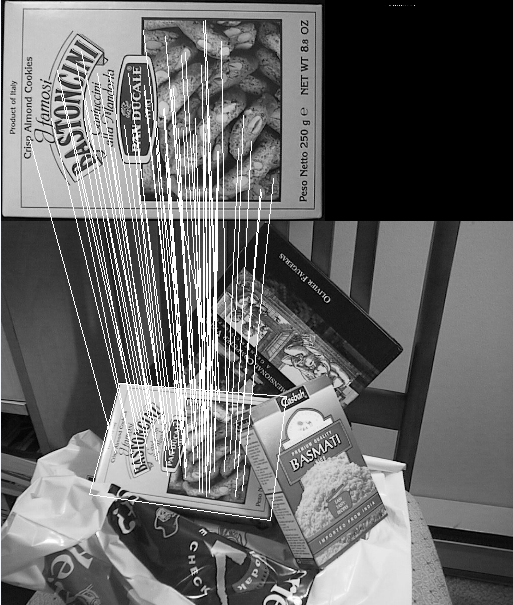 |
A imagem acima demonstra na íntegra o problema resolvido de reconhecimento das características invariantes. Ressalto que as soluções propostas neste documento são apenas uma de inúmeras maneiras de equacionar tal tarefa computacional.
Programação multinuclear e GPU
A programação paralela é obrigatório para obter o melhor desempenho em equipamentos atuais multicores. Algumas sugestões são as bibliotecas OpenMP ou TBB (Threading Building Blocks) da Intel, que encarregam-se da utilização do software ao ambiente baseado na quantidade de núcleos.
Para continuar a interminável corrida no código perfeito, para obter leveza e suavidade em sistemas de visão computacional junto à programação paralela, é saudável utilizar o uso orquestrado das GPU e CPUs.
Atualmente existem APIs e/ou SDK da NVIDIA, Intel e ATI/AMD (mais informações em algumas edições na Linux Magazine, ou no site Viva o Linux).
Download e instalação
Aqui veremos algumas dicas dos pacotes com requisitos obrigatórios e opcionais. A decisão de utilizar todos estes pacotes fica a cargo de leitor e também da capacidade e configuração do hardware em utilização.
TBB (opcional)
Utilizei a biblioteca TBB por utilizar equipamento Intel, porém, o uso de bibliotecas similares é aconselhado. Vale a pena mencionar que a ausência deste recurso não permite a utilização de todos o núcleos presente no processador do seu equipamento. Então, a seguir as instruções de instalação:
$ wget http://www.threadingbuildingblocks.org/uploads/78/154/3.0/tbb30_018oss_src.tgz $ tar -zxvf tbb30_018oss_src.tgz $ make $ cd examples/ $ make
CUDA: GPU NVIDIA (opcional)
NVIDIA CUDA é uma arquitetura de computação paralela de propósito geral, que tira proveito do mecanismo de computação paralela das unidades de processamento gráfico (GPUs) NVIDIA para resolver muitos problemas computacionais complexos em uma fração do tempo necessário em uma CPU.
Mais informações sobre a instalação e configuração, no link a seguir: CUDA: Programe a sua NVIDIA
Download e compilação da biblioteca OpenCV (obrigatório)
O download dos fontes da biblioteca encontra-se no link: http://sourceforge.net/projects/opencvlibrary/files/opencv-unix/2.4.3/
E obtenha o pacote OpenCV-2.4.3.tar.bz2, ou superior. As instruções de compilação e configuração a seguir, foram testadas na versão 2.X.X, então, as demais versões poderão sofrer pequenas modificações.
Com o comando wget, efetue o download e descompacte o pacote:
$ wget http://sourceforge.net/projects/opencvlibrary/files/opencv-unix/2.4.3/OpenCV-2.4.3.tar.bz2 $ tar -jxvf tars/OpenCV-2.4.3.tar.bz2
Após a extração dos arquivos compactados, crie uma nova pasta na recém-criada, pelo comando tar. Entre neste novo diretório para a compilação dos fontes, seguindo as orientações a seguir:
$ cd OpenCV-2.4.3/ $ mkdir opencv.build $ cd opencv.build
Parâmetros de compilação
Como partimos do princípio que todos os pacotes opcionais foram instalados, a seguir os parâmetros de compilação, ou diretivas de compilação, do comando cmake para utilizar os os recursos na biblioteca OpenCV:
$ cmake -DBUILD_DOCS=ON \ -DCMAKE_BUILD_TYPE=RELEASE -DBUILD_LATEX_DOCS=ON \ -DBUILD_OCTAVE_SUPPORT=ON -DBUILD_PYTHON_SUPPORT=ON \ -DBUILD_SWIG_PYTHON_SUPPORT=ONF -DBUILD_TESTS=ON \ -DENABLE_OPENMP=OFF -DENABLE_PROFILING=OFF \ -DBUILD_PYTHON_SUPPORT=ON -DBUILD_NEW_PYTHON_SUPPORT=ON \ -DBUILD_EXAMPLES=ON -DINSTALL_C_EXAMPLES=ON \ -DINSTALL_OCTAVE_EXAMPLES=ON -DINSTALL_PYTHON_EXAMPLES=ON \ -DWITH_1394=ON -DWITH_TBB=ON -DWITH_CUDA=ON -DWITH_FFMPEG=ON \ -DWITH_GSTREAMER=OFF -DWITH_QT=ON -DWITH_GTK=ON \ -DWITH_JASPER=ON -DWITH_JPEG=ON -DWITH_PNG=ON -DWITH_TIFF=ON \ -DWITH_V4L=ON -DWITH_XINE=ON -DENABLE_SSE=ON -DENABLE_SSE2=ON \ -DENABLE_SSE3=ON -DENABLE_SSSE3=ON -DENABLE_SSE41=ON \ -DENABLE_SSE42=ON -DWITH_QT=ON -DWITH_QT_OPENGL=ON \ -DCUDA_NPP_LIBRARY_ROOT_DIR=/usr/local/cuda/NPP/SDK/..
A seguir, utilize o comando make e make install para compilar e instalar a biblioteca OpenCV:
$ make -j 24
** A opção "-j" permite processar durante a compilação mais de uma tarefa simultaneamente;
*** Vá tomar um café...
Como superusuário, utilize o comando make install e ldconfig e pronto! Nesta etapa todos os requisitos foram instalados com sucesso:
# make install # ldconfig
O sistema find-object
Este pacote é uma solução de código aberto baseado em Qt e OpenCV na plataforma GNU/Linux, que permite o learning (aprendizado) e detectar o objeto recém aprendido pelo sistema.
Este projeto é de código aberto, então, é uma boa fonte de aprendizagem para os programadores. Pois além de manipular Webcam, utiliza diversos algoritmos de reconhecimento de padrão como SURF e outros. Bom, chega de blá-blá-blá.
A instalação é simples. Efetue o download do código fonte no link a seguir:
# wget http://find-object.googlecode.com/files/Find-Object-0.4.0-Source.zip
Agora descompacte o arquivo com o comando unzip conforme o exemplo abaixo:
# unzip Find-Object-0.4.0-Source.zip Archive: Find-Object-0.4.0-Source.zip inflating: Find-Object-0.4.0-Source/build/.empty inflating: Find-Object-0.4.0-Source/src/AddObjectDialog.h inflating: Find-Object-0.4.0-Source/src/ParametersToolBox.h inflating: Find-Object-0.4.0-Source/src/Camera.h inflating: Find-Object-0.4.0-Source/src/ParametersToolBox.cpp inflating: Find-Object-0.4.0-Source/src/resources.qrc inflating: Find-Object-0.4.0-Source/src/AboutDialog.cpp inflating: Find-Object-0.4.0-Source/src/KeypointItem.h inflating: Find-Object-0.4.0-Source/src/ui/mainWindow.ui inflating: Find-Object-0.4.0-Source/src/ui/addObjectDialog.ui inflating: Find-Object-0.4.0-Source/src/ui/aboutDialog.ui inflating: Find-Object-0.4.0-Source/src/QtOpenCV.h inflating: Find-Object-0.4.0-Source/src/AddObjectDialog.cpp inflating: Find-Object-0.4.0-Source/src/Settings.cpp inflating: Find-Object-0.4.0-Source/src/MainWindow.cpp inflating: Find-Object-0.4.0-Source/src/AboutDialog.h inflating: Find-Object-0.4.0-Source/src/ObjWidget.h inflating: Find-Object-0.4.0-Source/src/utilite/UFile.cpp inflating: Find-Object-0.4.0-Source/src/utilite/UFile.h inflating: Find-Object-0.4.0-Source/src/utilite/UDirectory.cpp inflating: Find-Object-0.4.0-Source/src/utilite/UDirectory.h inflating: Find-Object-0.4.0-Source/src/utilite/UPlot.h inflating: Find-Object-0.4.0-Source/src/utilite/UPlot.cpp inflating: Find-Object-0.4.0-Source/src/utilite/UStl.h inflating: Find-Object-0.4.0-Source/src/resources/Find-Object.png inflating: Find-Object-0.4.0-Source/src/resources/TheWorkingGroup_video_play.ico inflating: Find-Object-0.4.0-Source/src/resources/TheWorkingGroup_video_stop.ico inflating: Find-Object-0.4.0-Source/src/resources/TheWorkingGroup_video_pause.ico inflating: Find-Object-0.4.0-Source/src/Camera.cpp inflating: Find-Object-0.4.0-Source/src/Settings.h inflating: Find-Object-0.4.0-Source/src/KeypointItem.cpp inflating: Find-Object-0.4.0-Source/src/MainWindow.h inflating: Find-Object-0.4.0-Source/src/QtOpenCV.cpp inflating: Find-Object-0.4.0-Source/src/rtabmap/PdfPlot.h inflating: Find-Object-0.4.0-Source/src/rtabmap/PdfPlot.cpp inflating: Find-Object-0.4.0-Source/src/ObjWidget.cpp inflating: Find-Object-0.4.0-Source/.project inflating: Find-Object-0.4.0-Source/CMakeLists.txt inflating: Find-Object-0.4.0-Source/example/CMakeLists.txt inflating: Find-Object-0.4.0-Source/example/main.cpp inflating: Find-Object-0.4.0-Source/bin/box.png inflating: Find-Object-0.4.0-Source/bin/box_in_scene.png inflating: Find-Object-0.4.0-Source/.cproject inflating: Find-Object-0.4.0-Source/LICENSE inflating: Find-Object-0.4.0-Source/README inflating: Find-Object-0.4.0-Source/app/CMakeLists.txt inflating: Find-Object-0.4.0-Source/app/Find-Object.icns inflating: Find-Object-0.4.0-Source/app/Find-Object.ico inflating: Find-Object-0.4.0-Source/app/Find-Object.ifx inflating: Find-Object-0.4.0-Source/app/main.cpp inflating: Find-Object-0.4.0-Source/app/Find-Object.rc inflating: Find-Object-0.4.0-Source/cmake_uninstall.cmake.in
Para iniciar a compilação, entre na pasta Find-Object-0.4.0-Source/build e utilize o comando cmake:
# cd Find-Object-0.4.0-Source/build # cmake .. -- The C compiler identification is GNU 4.7.1 -- The CXX compiler identification is GNU 4.7.1 -- Check for working C compiler: /usr/bin/gcc -- Check for working C compiler: /usr/bin/gcc -- works -- Detecting C compiler ABI info -- Detecting C compiler ABI info - done -- Check for working CXX compiler: /usr/bin/c++ -- Check for working CXX compiler: /usr/bin/c++ -- works -- Detecting CXX compiler ABI info -- Detecting CXX compiler ABI info - done -- Looking for Q_WS_X11 -- Looking for Q_WS_X11 - found -- Looking for Q_WS_WIN -- Looking for Q_WS_WIN - not found. -- Looking for Q_WS_QWS -- Looking for Q_WS_QWS - not found. -- Looking for Q_WS_MAC -- Looking for Q_WS_MAC - not found. -- Found Qt4: /usr/bin/qmake (found version "4.8.1") -- -------------------------------------------- -- Info : -- CMAKE_INSTALL_PREFIX = /usr/local -- CMAKE_BUILD_TYPE = Release -- -------------------------------------------- -- Configuring done -- Generating done -- Build files have been written to: /tmp/Find-Object-0.4.0-Source/build
Para iniciar a compilação e instalação, abaixo os comandos:
# make # make install
Conceitos operacionais
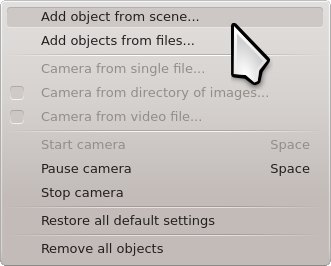
Inicie o programa Find Object com o comando find_object, como no exemplo abaixo. Logo após, iniciaremos a nossa Webcam pressionando a tecla espaço. Se tudo estiver funcionando corretamente, entre na opção "EDIT" do menu, e selecione o item "Add object from scene".
$ find_object
 |
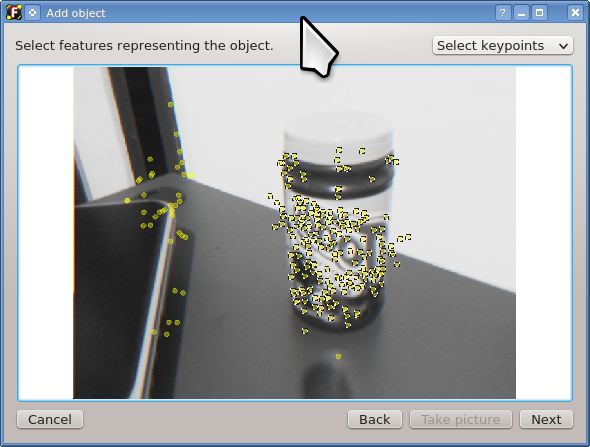
Agora, para executar o modo learning (aprendizado computacional), devemos focar a Webcam no objeto desejado e selecionar os pontos característicos do objeto e logo a seguir, clique em "NEXT".
 |
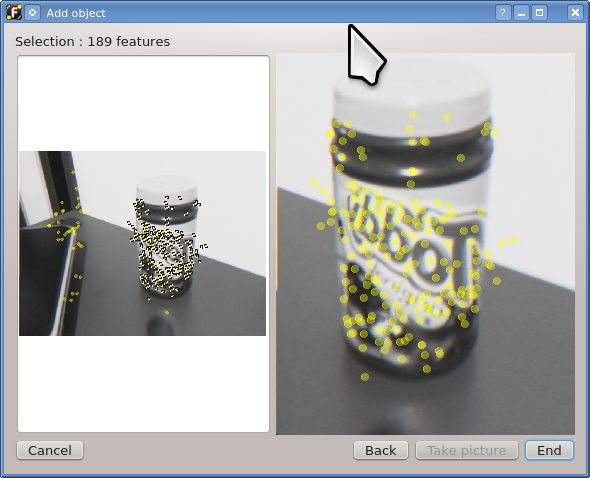 |
Pronto, ao concluir o processo, o sistema passa a identificar e/ou reconhecer no vídeo, ao vivo, o objeto selecionado anteriormente.
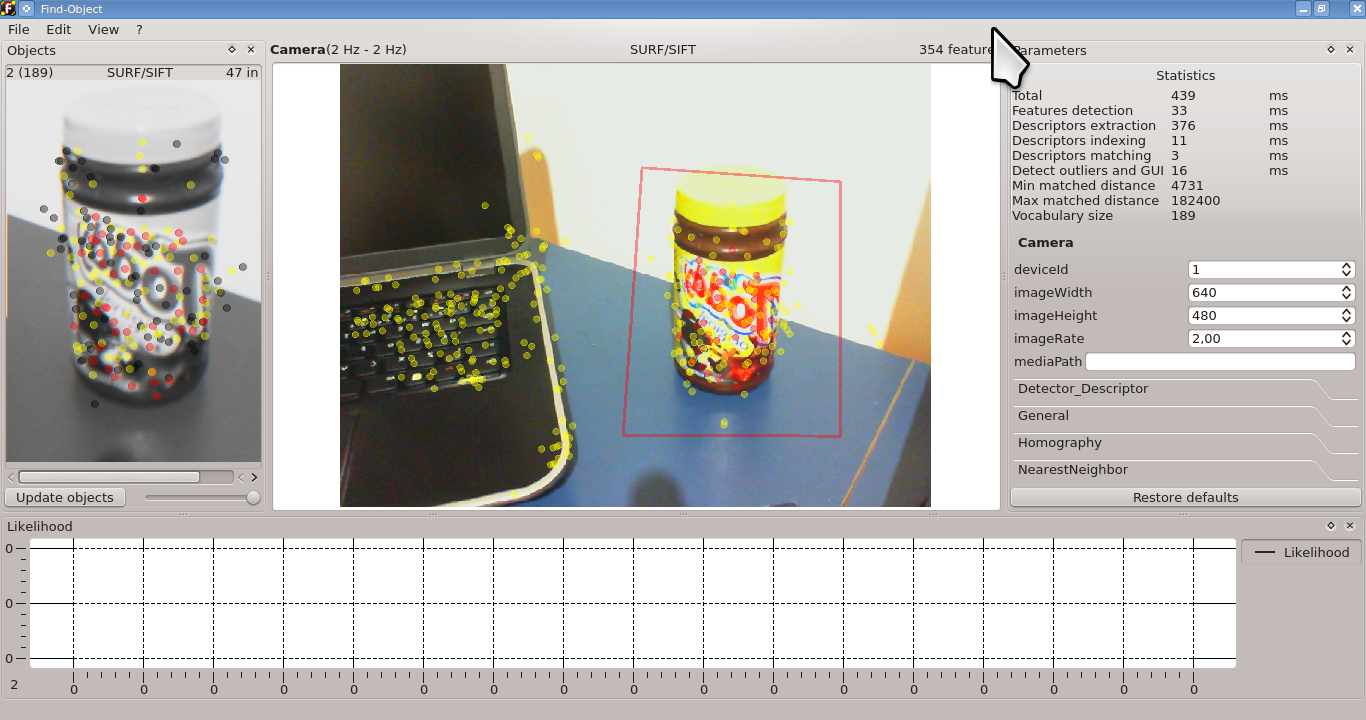 |
A seguir, um vídeo demonstrativo com a funcionalidade do sistema em operação...
Mais dicas sobre este assunto, disponibilizarei no meu blog: Inteligência Coletiva « cabelovivaolinux.wordpress.com
Para finalizar, críticas e sugestões: cabelo[ at ]opensuse.org
Este artigo foi publicado originalmente no portal Viva o Linux
Alessandro de Oliveira Faria é sócio-fundador da empresa NETi TECNOLOGIA fundada em Junho de 1996 (http://www.netitec.com.br), empresa especializada em desenvolvimento de software e soluções biométricas, Consultor Biométrico na tecnologia de reconhecimento facial, atuando na área de tecnologia desde 1986 assim proporcionando ao mercado soluções em software nas mais diversas linguagens e plataforma, levando o Linux a sério desde 1998 com desenvolvimento de soluções open-source, diversos documentos técnicos disponibilizados na internet, membro colaborador da comunidade Viva O Linux, mantenedor da biblioteca open-source de vídeo captura entre outros projetos.
Adicionar comentário
This policy contains information about your privacy. By posting, you are declaring that you understand this policy:
- Your name, rating, website address, town, country, state and comment will be publicly displayed if entered.
- Aside from the data entered into these form fields, other stored data about your comment will include:
- Your IP address (not displayed)
- The time/date of your submission (displayed)
- Your email address will not be shared. It is collected for only two reasons:
- Administrative purposes, should a need to contact you arise.
- To inform you of new comments, should you subscribe to receive notifications.
- A cookie may be set on your computer. This is used to remember your inputs. It will expire by itself.
This policy is subject to change at any time and without notice.
These terms and conditions contain rules about posting comments. By submitting a comment, you are declaring that you agree with these rules:
- Although the administrator will attempt to moderate comments, it is impossible for every comment to have been moderated at any given time.
- You acknowledge that all comments express the views and opinions of the original author and not those of the administrator.
- You agree not to post any material which is knowingly false, obscene, hateful, threatening, harassing or invasive of a person's privacy.
- The administrator has the right to edit, move or remove any comment for any reason and without notice.
Failure to comply with these rules may result in being banned from submitting further comments.
These terms and conditions are subject to change at any time and without notice.
Comentários